Розкладання матриці за сингулярним значенням (SVD) — це розкладання цієї матриці на три матриці. Він має деякі цікаві алгебраїчні властивості та передає важливі геометричні та теоретичні ідеї щодо лінійних перетворень. Він також має деякі важливі застосування в науці про дані. У цій статті я спробую пояснити математичну інтуїцію SVD та її геометричне значення.
Математика за СВД:
SVD mxn матриці A задається формулою 
де:
- В: mxm матриця ортонормованих власних векторів
 .
. - INТ: транспонувати a nxn матриця, що містить ортонормовані власні вектори
 .
. -
 : діагональна матриця з r елементів, що дорівнюють кореню додатних власних значень AAᵀ або Aᵀ A (обидві матриці все одно мають однакові додатні власні значення).
: діагональна матриця з r елементів, що дорівнюють кореню додатних власних значень AAᵀ або Aᵀ A (обидві матриці все одно мають однакові додатні власні значення).



Приклади
- Знайти SVD для матриці A =

- Щоб обчислити SVD, спочатку нам потрібно обчислити сингулярні значення, знайшовши власні значення AA^{T}.


- Характеристичне рівняння для наведеної вище матриці:



рядок підрядок java
тому наші одиничні значення: 
- Тепер ми знаходимо правильні сингулярні вектори, тобто ортонормований набір власних векторів AТA. Власні значення AТА дорівнює 25, 9 і 0, а оскільки АТA є симетричним, ми знаємо, що власні вектори будуть ортогональними.
для 

який можна скоротити рядком до:

Одиничний вектор у напрямку до нього:

Аналогічно, для lambda = 9 власний вектор дорівнює:

Для третього власного вектора ми можемо використати властивість, що він перпендикулярний до v1 і v2 так, що:

файлова система в linux
Розв’язування наведеного вище рівняння для створення третього власного вектора

бази даних
Тепер ми обчислюємо U за формулою u_i = frac{1}{sigma} A v_i, і це дає U =  . Отже, наше остаточне рівняння SVD виглядає так:
. Отже, наше остаточне рівняння SVD виглядає так:

Додатки
- Розрахунок псевдоінверсії: Псевдообернена або обернена Мура-Пенроуза — це узагальнення оберненої матриці, яка може бути необоротною (наприклад, матриці низького рангу). Якщо матриця оборотна, то її обернена буде дорівнювати Псевдооберненій, але псевдообернена існує для матриці, яка не є оборотною. Позначається А+.
Suppose, we need to calculate the pseudo-inverse of a matrix M: Then, the SVD of M can be given as: Multiply both sides by M^{-1}.Multiply both side by V:Multiply by W^{-1}Since the W is the singular matrix, the inverse of W is Multiply by>Наведене вище рівняння дає псевдообернене.
Розв’язування системи однорідного лінійного рівняння (Mx =b): якщо b=0, обчисліть SVD і візьміть будь-який стовпець VТпов'язане з одиничним значенням (в IN ) дорівнює 0.
If , Multiply by>
З псевдоінверсії ми це знаємо 
Отже,

- Ранг, діапазон і нульовий простір:
- Ранг матриці M можна обчислити з SVD за кількістю ненульових сингулярних значень.
- Діапазоном матриці M є ліві сингулярні вектори U, що відповідають ненульовим сингулярним значенням.
- Нульовий простір матриці M є правими сингулярними векторами V, що відповідають обнуленим сингулярним значенням.

- Проблема підгонки кривої: Сингулярне розкладання можна використовувати для мінімізації помилки найменших квадратів. Для його апроксимації використовується псевдоінверсія.
- Окрім вищезазначеного застосування, сингулярне розкладання та псевдоінверсія також можуть бути використані в цифровій обробці сигналів та обробці зображень
Реалізація:
У цьому коді ми спробуємо обчислити декомпозицію сингулярного значення за допомогою Numpy і Scipy. Ми будемо обчислювати SVD, а також виконувати псевдоінверсію. Зрештою, ми можемо застосувати SVD для стиснення зображення
Python3
# Imports> from> skimage.color>import> rgb2gray> from> skimage>import> data> import> matplotlib.pyplot as plt> import> numpy as np> from> scipy.linalg>import> svd> '''> Singular Value Decomposition> '''> # define a matrix> X>=> np.array([[>3>,>3>,>2>], [>2>,>3>,>->2>]])> print>(X)> # perform SVD> U, singular, V_transpose>=> svd(X)> # print different components> print>(>'U: '>, U)> print>(>'Singular array'>, singular)> print>(>'V^{T}'>, V_transpose)> '''> Calculate Pseudo inverse> '''> # inverse of singular matrix is just the reciprocal of each element> singular_inv>=> 1.0> /> singular> # create m x n matrix of zeroes and put singular values in it> s_inv>=> np.zeros(X.shape)> s_inv[>0>][>0>]>=> singular_inv[>0>]> s_inv[>1>][>1>]>=> singular_inv[>1>]> # calculate pseudoinverse> M>=> np.dot(np.dot(V_transpose.T, s_inv.T), U.T)> print>(M)> '''> SVD on image compression> '''> cat>=> data.chelsea()> plt.imshow(cat)> # convert to grayscale> gray_cat>=> rgb2gray(cat)> # calculate the SVD and plot the image> U, S, V_T>=> svd(gray_cat, full_matrices>=>False>)> S>=> np.diag(S)> fig, ax>=> plt.subplots(>5>,>2>, figsize>=>(>8>,>20>))> curr_fig>=> 0> for> r>in> [>5>,>10>,>70>,>100>,>200>]:> >cat_approx>=> U[:, :r] @ S[>0>:r, :r] @ V_T[:r, :]> >ax[curr_fig][>0>].imshow(cat_approx, cmap>=>'gray'>)> >ax[curr_fig][>0>].set_title(>'k = '>+>str>(r))> >ax[curr_fig,>0>].axis(>'off'>)> >ax[curr_fig][>1>].set_title(>'Original Image'>)> >ax[curr_fig][>1>].imshow(gray_cat, cmap>=>'gray'>)> >ax[curr_fig,>1>].axis(>'off'>)> >curr_fig>+>=> 1> plt.show()> |
>
>
Вихід:
[[ 3 3 2] [ 2 3 -2]] --------------------------- U: [[-0.7815437 -0.6238505] [-0.6238505 0.7815437]] --------------------------- Singular array [5.54801894 2.86696457] --------------------------- V^{T} [[-0.64749817 -0.7599438 -0.05684667] [-0.10759258 0.16501062 -0.9804057 ] [-0.75443354 0.62869461 0.18860838]] -------------------------- # Inverse array([[ 0.11462451, 0.04347826], [ 0.07114625, 0.13043478], [ 0.22134387, -0.26086957]]) ---------------------------> 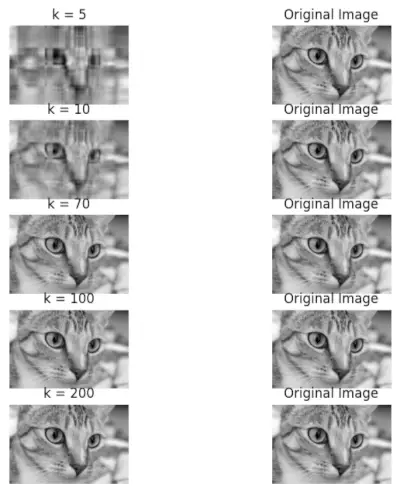
Оригінальне та SVD k-зображення